Versnellingen gemeten op een wiek
Onderstaande webpagina is nog
niet volledig!
Op
verschillende molens zijn metingen verricht om de
zwaartekrachtversnelling, middelpuntszoekende versnelling en
wiek rotatiesnelheid te meten.
Meet
condities
- De
metingen zijn gedaan met een iPhone SE 2016 (MLLP2DN/A).
- Het
coordinate systeem van de iPhone is:
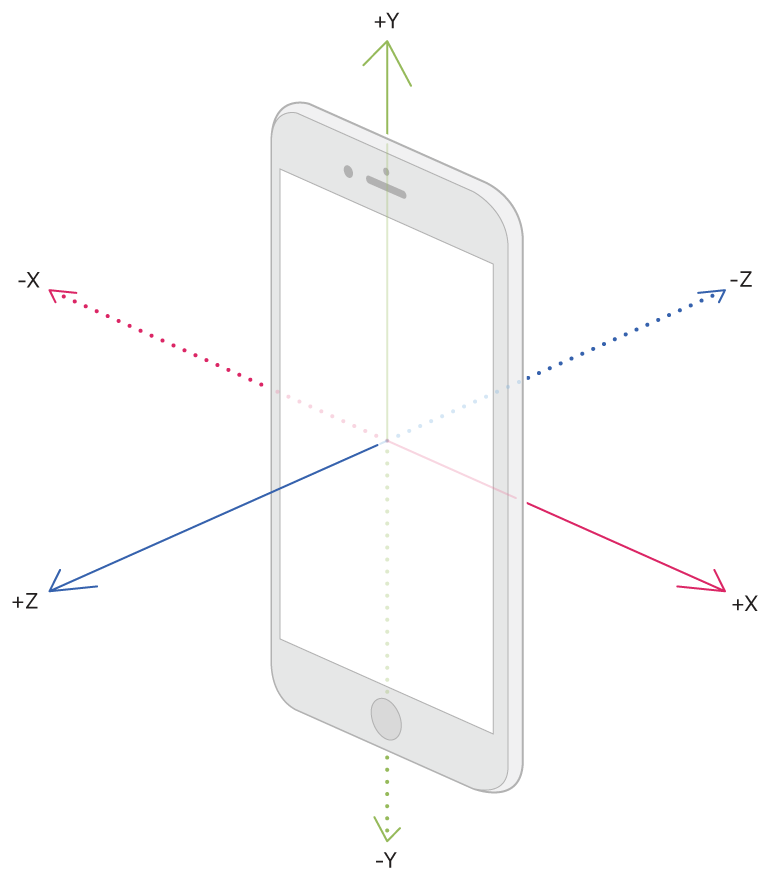
- Als we voor het gevlucht staan en tegen de wijzers van de klok
gaan, dan is een wiekend op een rotatiehoek:
- γ=0° onderin het gevlucht (referentie punt)
- γ=90° rechts
- γ=180° bovenin het gevlucht
- γ=270° links
- In onderstaande (radar) figuren zijn onder en boven
omgedraaid (sorry: iets verwarrend dus!):
- De sensor
App is: Sensor Logger
(100 samples per seconde.
Het is te verwachten dat dez App, de Apple Core
Motion functies gebruikt.
- De
iPhone zit:
- op hek
aan de voorzijde van hekwerk; rustend op de een na
onderste heklat (zo'n 30cm van onderkant roede) en met de
achterkant van iPhone tegen de eerste binnenzoom (dichts
bij roede).
- op
roede aan voorzijde; ongeveer 30cm van onderkant roede
- Alle vier enden dezelfde zeilvoering (bv 4 volle of 4 lange
halve)
Om geen extra invloeden door verschillende zeilvorming/krachten
te veroorzaken
- Zorg ervoor dat rem/regelkleppen niet in werking treden over
het gehele gevlucht
Om geen onregelmatigheden door de rem/regelkleppen te
veroorzaken. Als de rem/regelkleppen toch in werking trden, de
tijden noteren,
- Waarschijnlijk moet de momentane windrichting en snelheid ook
gemeten worden
De yaw (ε) van de wind kan belangrijk
zijn voor de krachten op wiek.
- Probeer een windbiotoop voor en achter het gevlucht te hebben
dat voor beide zo open mogelijk is.
Noteer de biotoop
- Benaming van meeting:
<molennaam>-<zeilvoering>-<wieknummer>-<OH|FW|HW[+B|D]>-<h(ek)|r(oede)>-[<datum>-[<tijd>]]
Gemeten op de volgende molens
- De Zwiepse Molen,
te Zwiep
Stalen roedes, 22.5m lang; fok wiek (FW) (binnen: Groot
Wesseldijk-50), oud hollands (OH) (buiten: ???)
- Daams' Molen te
Vaassen
Stalen roedes, 22.4m lang; oud hollands (OH) (binnen: Derkx-630;
buiten: Derkx-629)
- Wissink's Möl te
Usselo
Houten borstroedes, 25,1m lang; oud hollands (OH) (beide: Groot
Wesseldijk)
- Prins van Oranje te
Bredevoort
Stalen roedes, 25m lang; ten Have wiek met van Bussel (HW+B)
(binnen: Vaags-3), oud hollands met van Bussel (OH+B) (buiten:
Vaag-2)
|
 |
 |
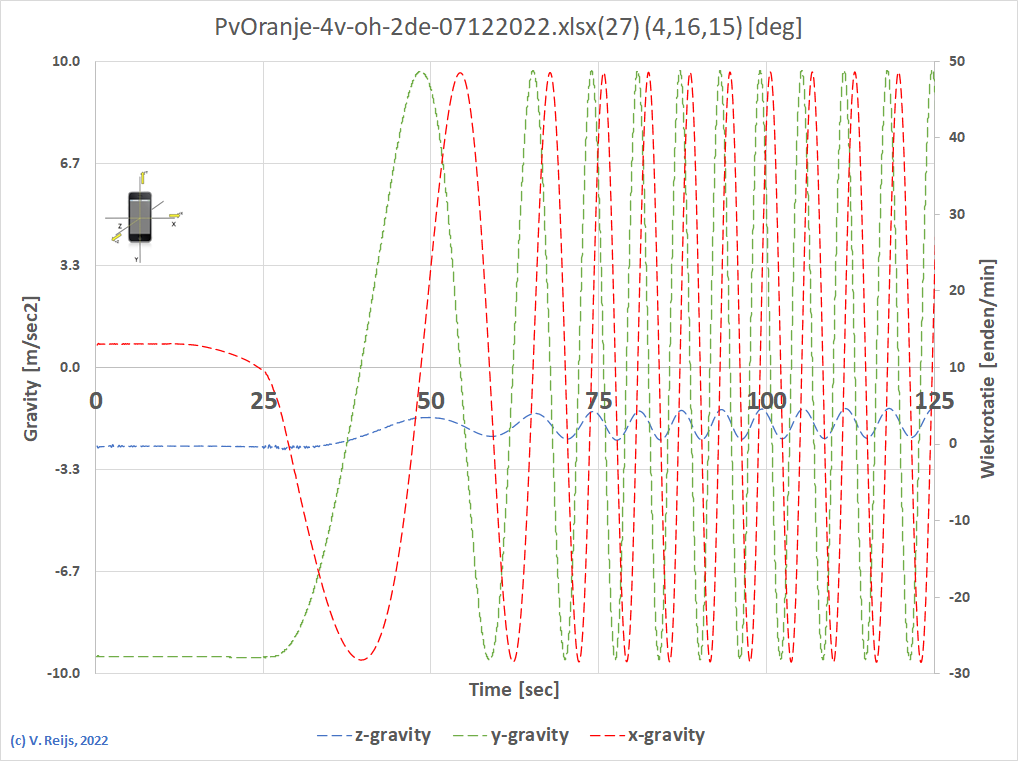 |
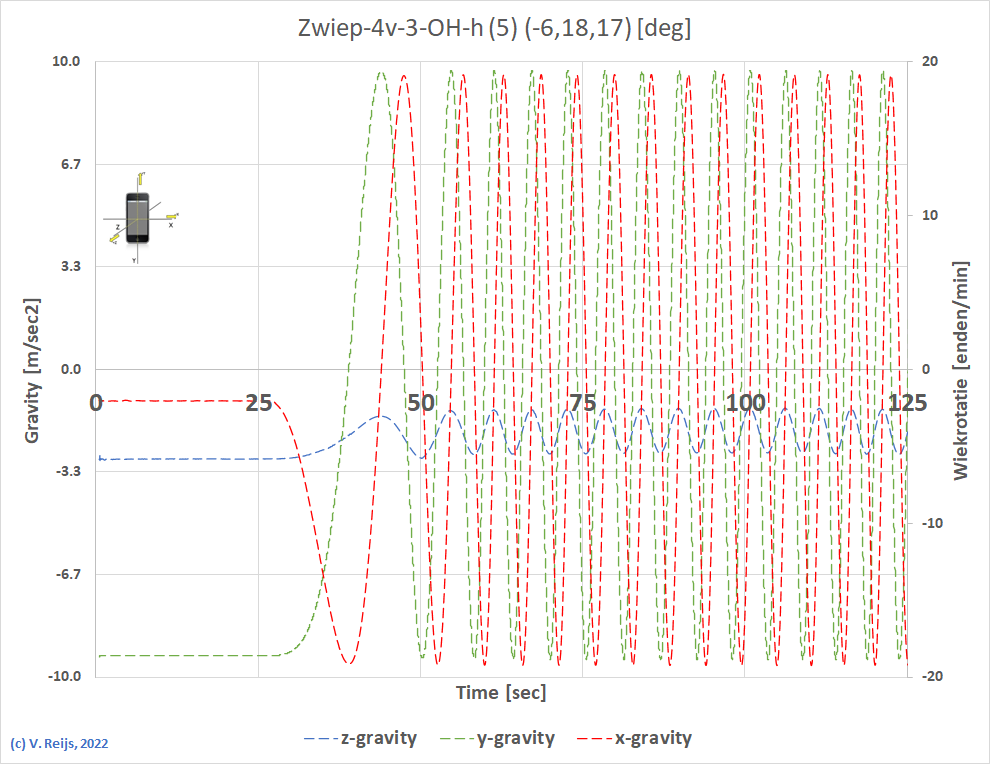
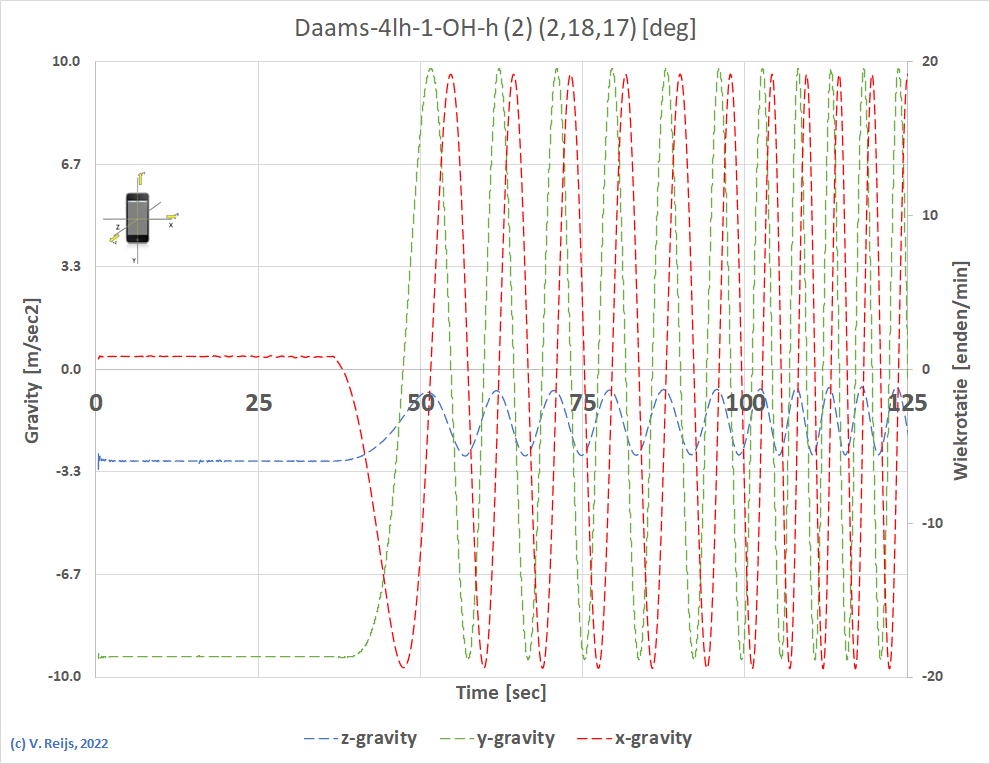
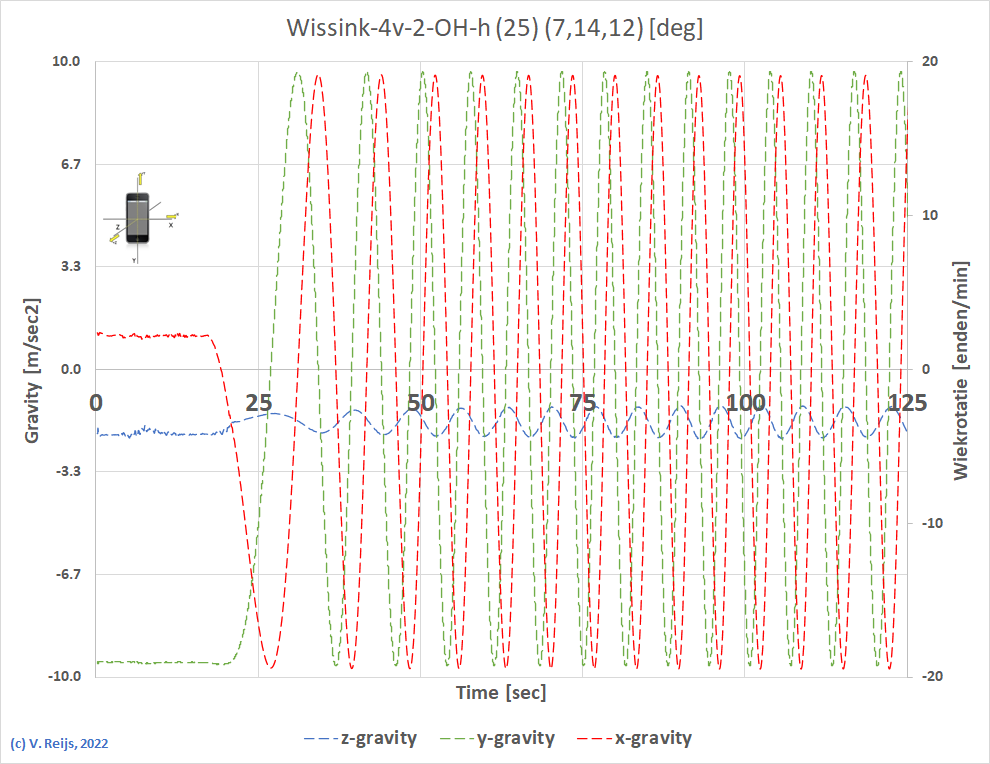
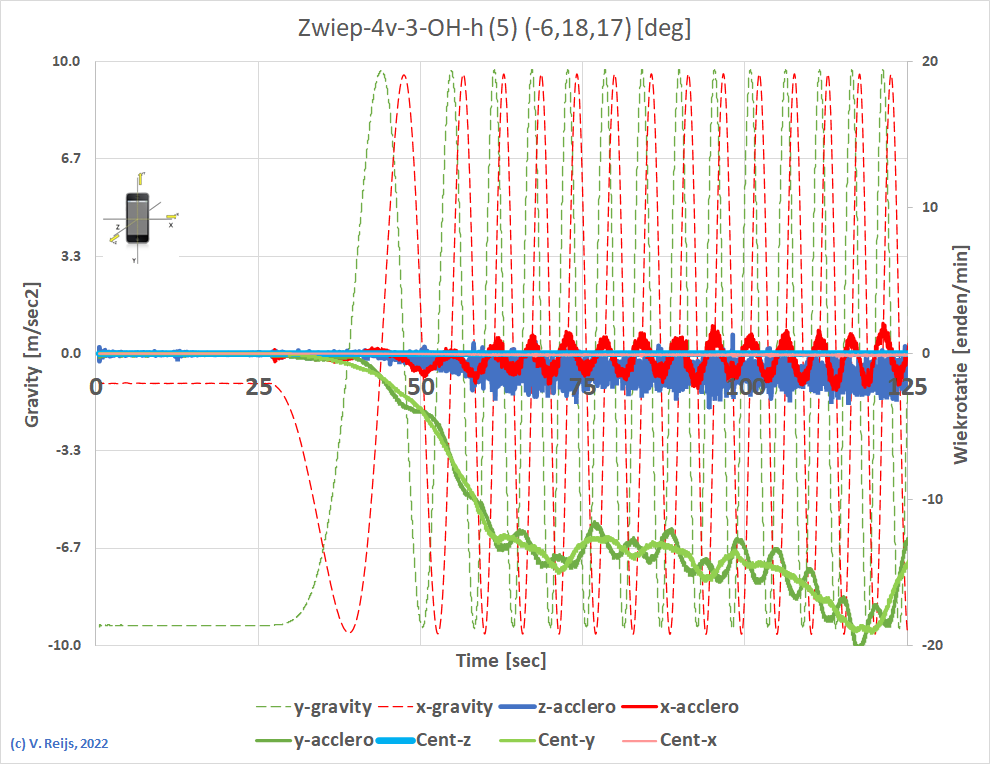
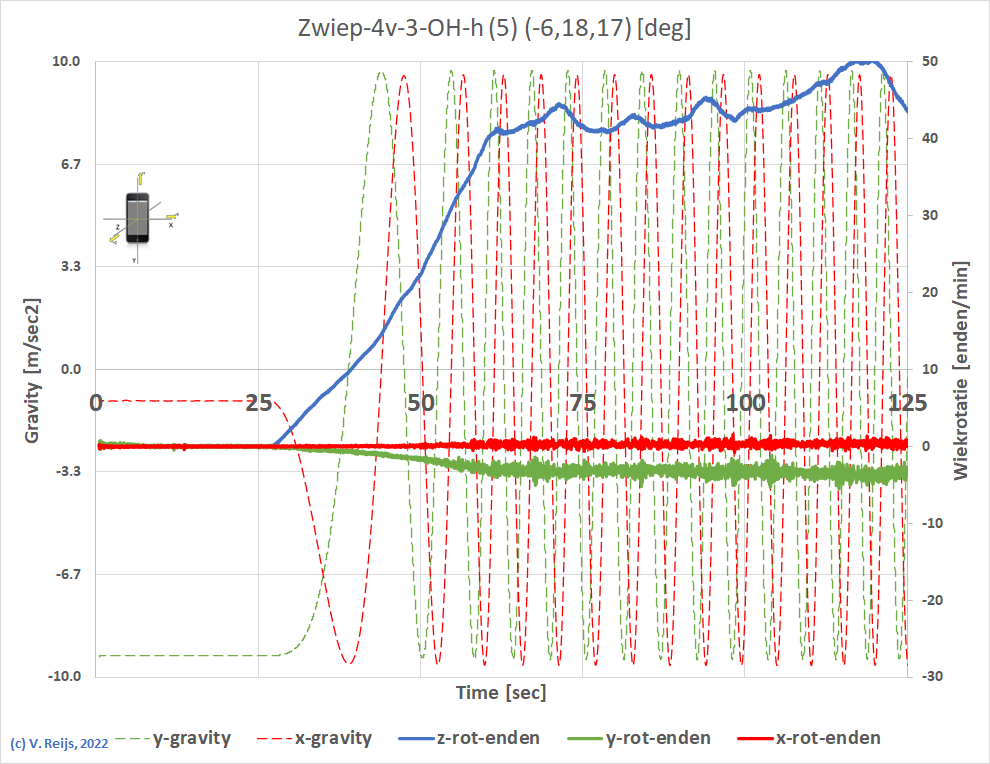
De 3D zwaartekrachtsversnelling
is weeregegeven in m/sec2
(links).
Als de gravity-sensor beneden staat (Time <=
25sec), dan is:
y-gravity (groen gestippeld) dicht bij de
zwaartekrachtsversnelling (-9.5m/sec2)
en als de gravity-sensor boven staat is de
zwaartekrachtsversnelling ongeveer 9.7m/sec2;
x-gravity (rood gestippeld) is bijna nul (en ijlt
90° [kwart wiek rotatie] na op y-gravity);
z-gravity (blauw gestippeld) blijft
klein (tegengesteld aan x-gravity). omdat naar
achteren/voren er bijna geen zwaartekrachtsversnelling
heerst.
De magnitude van de 3D zwaartekrachtsversnelling is
altijd: 9.8m/sec2.
|
 |
 |
 |
 |
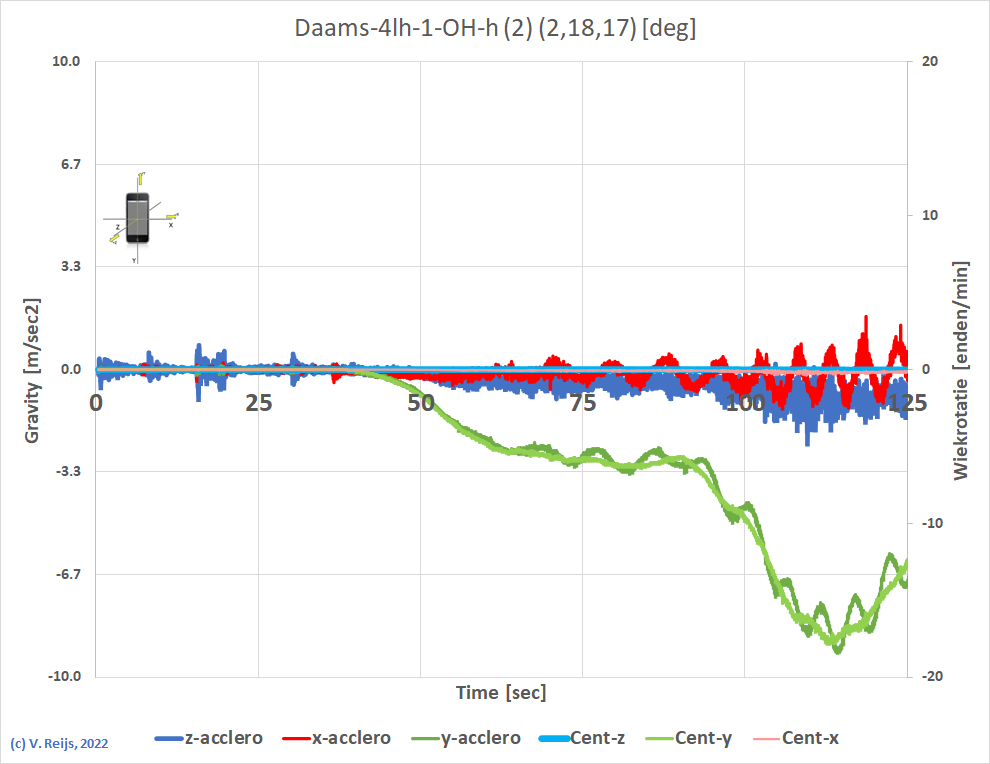
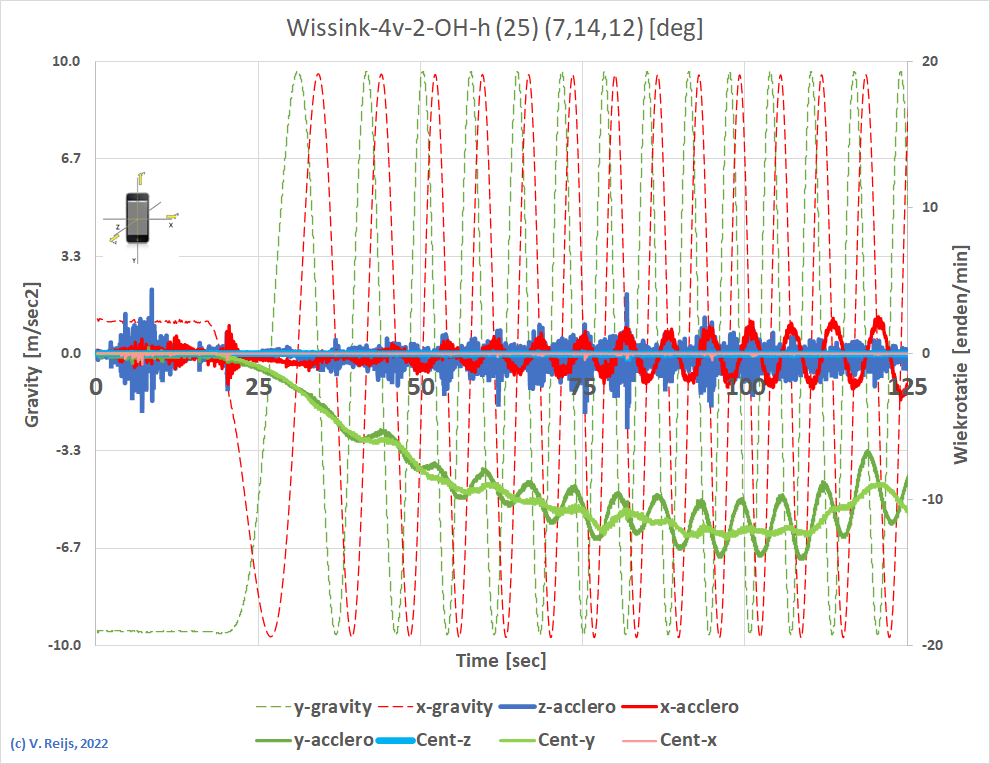
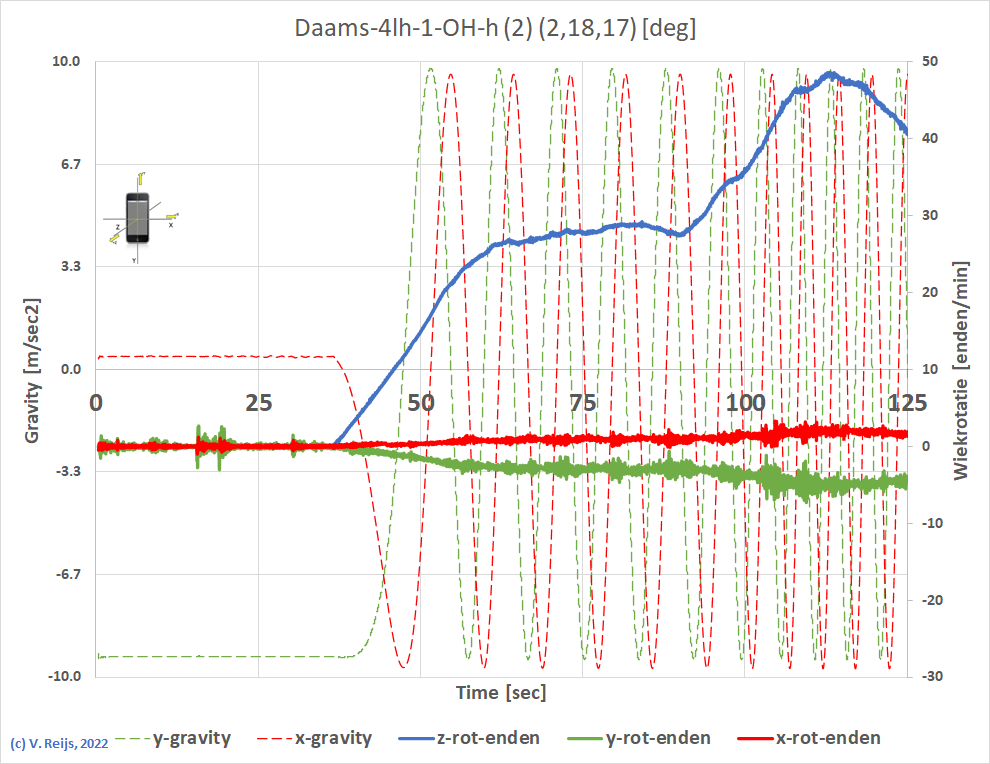
De 3D middelpuntzoekende
versnelling is weergeven als m/sec2
(rechts).
Deze is op twee manieren bepaald: met de
acceleration-sensor (heeft een kleine additionele sinus
component) en met gyroscope-sensor (lijkt redelijk
gemiddeld):
y acceleration (groen en licht groen) geeft de
middelpuntzoekende versnelling weer;
x acceleration (rood en licht rood) geeft
middelpuntzoekende versnelling weer in x richting (in vlak
van draaiing: een additionele rotatie hoek Δγ), deze is
bijna nul;
z acceleration (blauw en licht blauw) geeft
middelpuntzoekende versnelling weer in z richting (naar
achteren/voren: een flapping hoek Δδ), deze is bijna nul.
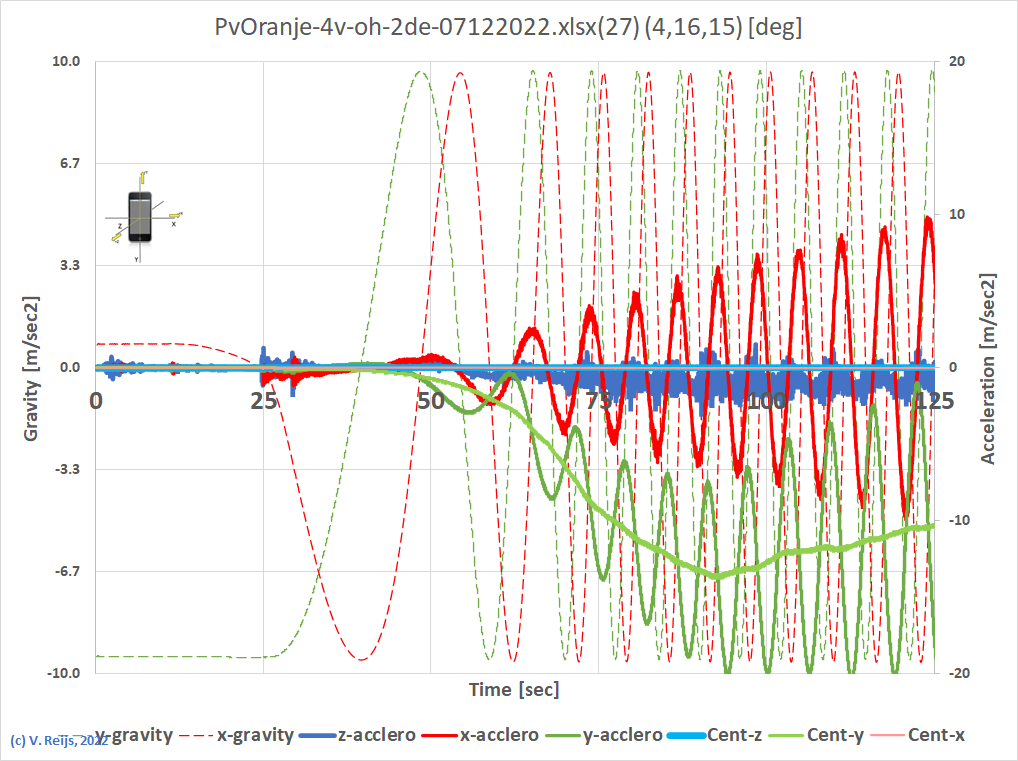
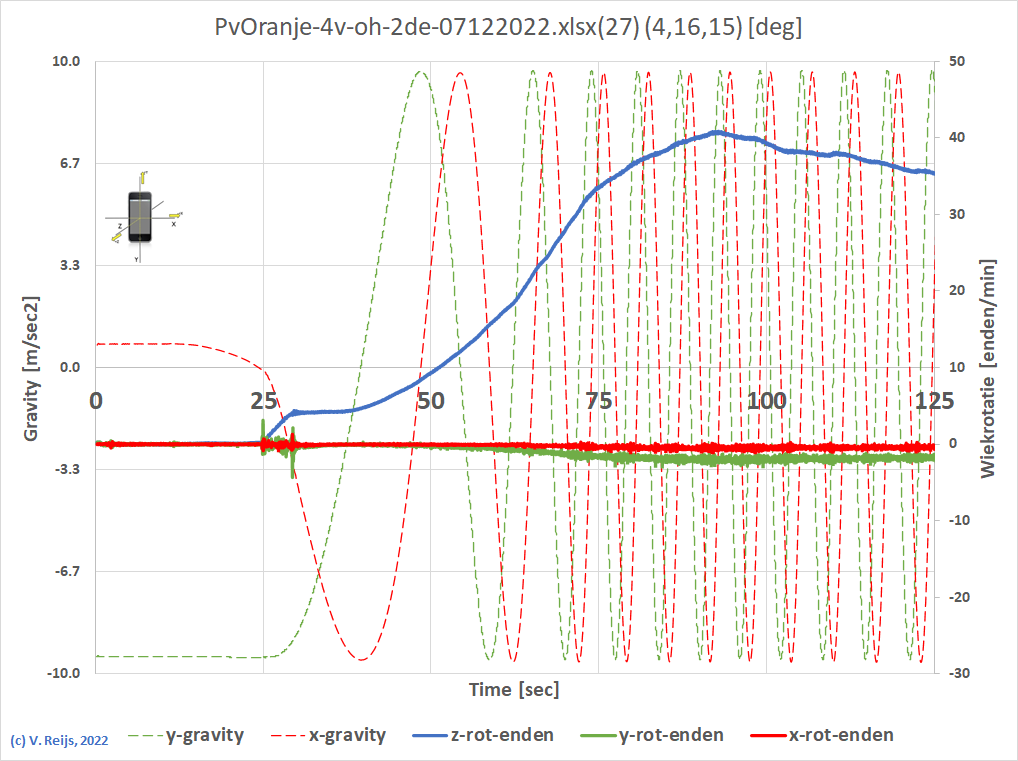
De sinus in x acceleration (rood) wordt
groter naarmate de tijd verstrijkt (zoals bv bij Prins
van Oranje); ook te zien in y acceleration (groen). Waar
dit vandaan komt, is nog onbekend (self calibration of
App?)
Feedback is welkom.
|
 |
 |
 |
 |
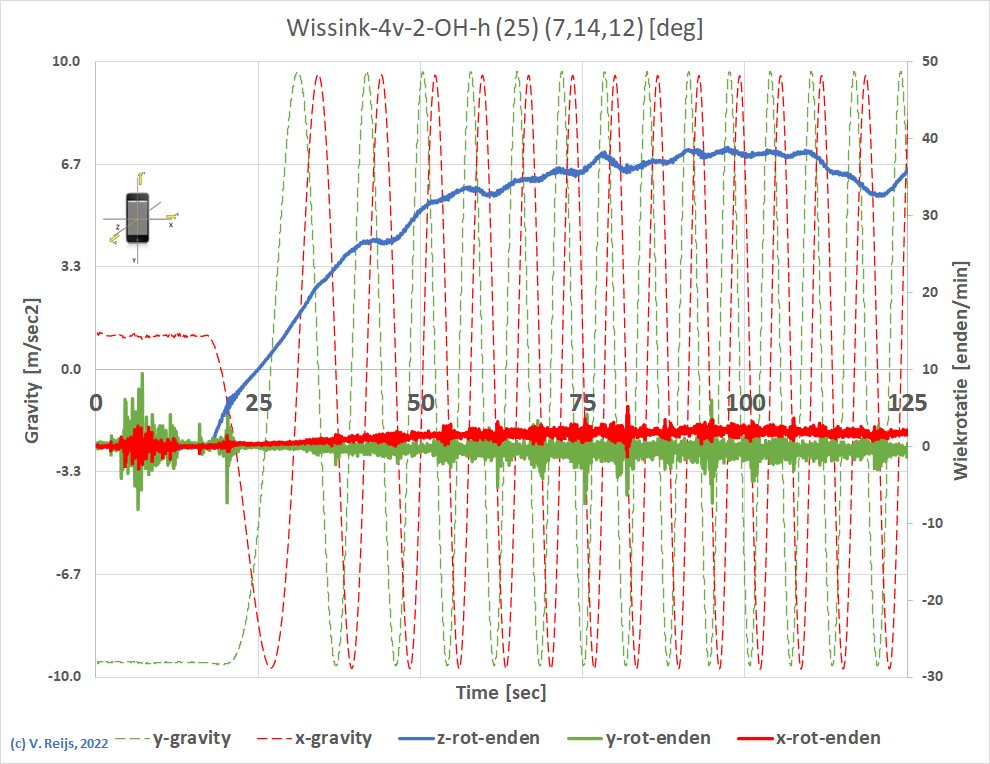
De 3D
wiekrotatiesnelheid is weergeven als enden/min (rechts)
Deze is bepaald met de gyroscope-sensor:
z rot-enden (blauw) geeft het aantal enden
dat het wiekenkruis draait;
y rot-enden (groen) zorgt voor een
tordering van de roede: een additionele pitch
hoek Δβ (lijkt tegengesteld aan het gedrag
van z rot-enden te verlopen);
x rot-enden (rood) zorgt voor een doorbuigen
van wiek naar achteren/voren: een flapping
hoek Δδ (lijkt het gedrag van z rot-enden
te volgen).
|
Wat zeggen deze grafieken?
Er zijn diverse zaken te zien:
- Er zijn behoorlijke rippels op de z
(blauw) acceleration en wat kleiner op x (rood) acceleration
- Misschien dat bovenstaande-genoemde acceleration
rippels ook in de x (rood) en y (groen) gravity (mooie?
sinussen) te zien zijn.
Dit wordt nader onderzocht: is de sinus vorm inderdaad een pure
sinusvorm?
Dit is misschien gerelateerd aan respectievelijk een flapping
hoek Δδ en rotatie hoek Δγ. Nader onderzoek wordt gedaan. Dit
zou een extra vervorming kunnen veroorzaken in het draaivlak.
- Bij alle molens is er een groeiende sinus in de x (rood) en y
(groen) acceleration te zien (in sommige andere grafieken laat
het een soort staande golf zien).
Ik denk dat dit een artefact is van de App, die probeert een
draaiende sensor te calibreren. Dit is nog niet helemaal zeker,
hoop dat de App maker op mijn feedback reageerd. Waarshijnlijk
moet ik de Apple Core Motion
functies hiervoor bestuderen.
- Er zitten kleine rippeltjes op de x (rood) rot-enden en y
(groen) rot-enden
Deze hebben hoogstwaarschijnlijk te maken met respectievelijk
een flapping hoek Δδ en een additionele pitch hoek Δβ. Deze twee
hoeken kunnen vervormingen en extra belastingen op de roede
veroorzaken. Nader onderzoek wordt gedaan, zie volgende paragrafen.
- Misschien zie je nog andere dingen? Feedback is welkom.
Is er vervorming van de wiek tijdens het
draaien?
Eerst wat voorgaande opmerkingen:
- y-gravity en x-gravity (atan2(y-gravity,x-gravity)) wordt als
proxy genomen voor de rotatiehoek γ.
Zou mooi zijn om het alleen afhankelijk te maken van
y-gravity; maar hoe? Feedback is welkom.
In het referentiepunt (onderin): is y-gravity ongeveer -9.8m/sec2.
- y-gravity wordt het minste door allerlei afwijkingen (ruis
en/of fladderend) beinvloed [Loss, 2020, sectie 2.2.1].
Dit omdat de middelpuntzoekende kracht het groots is in deze
richting.
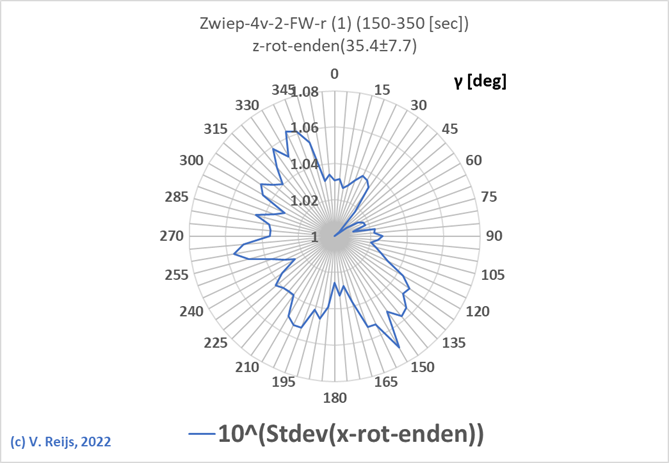
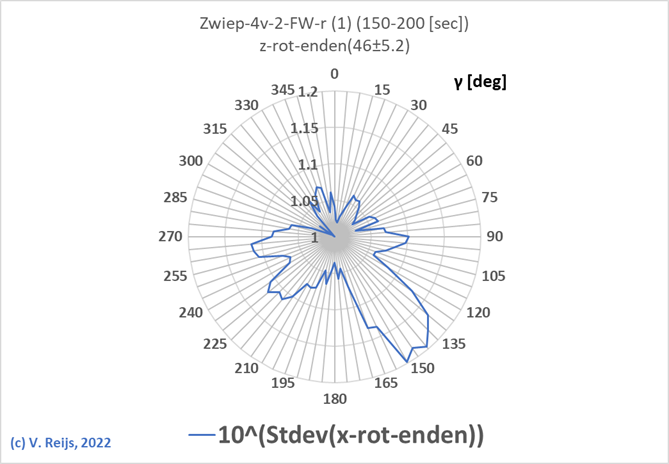
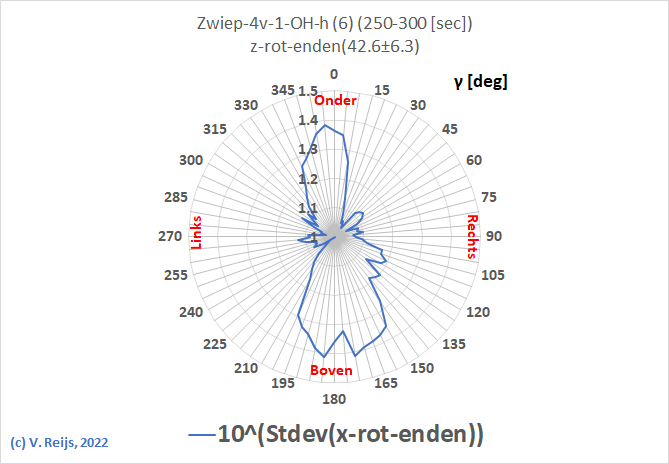
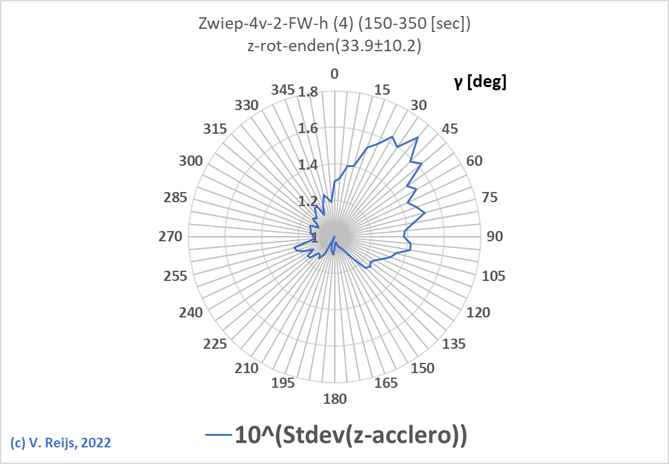
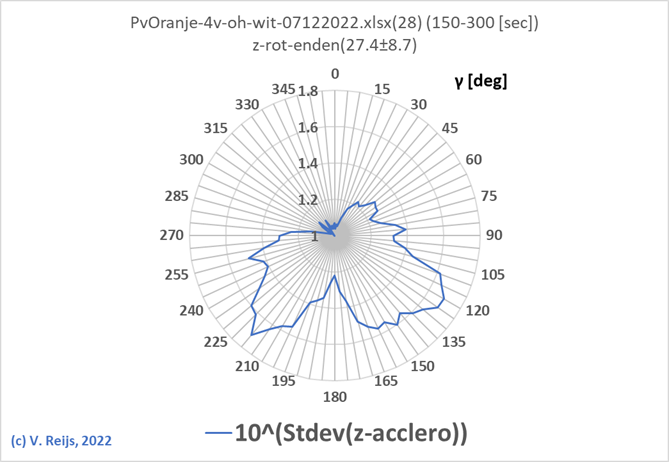
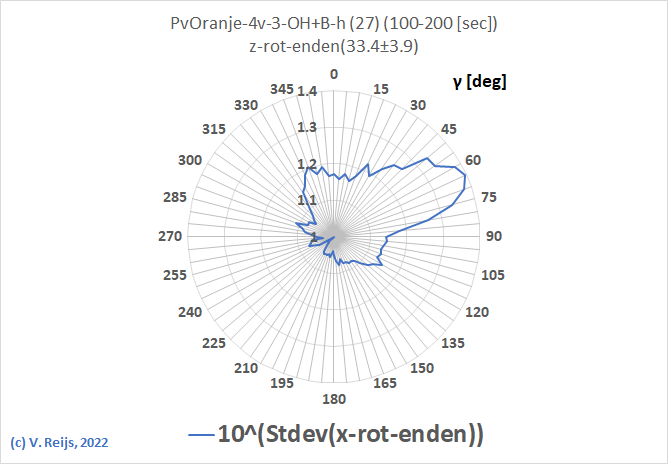
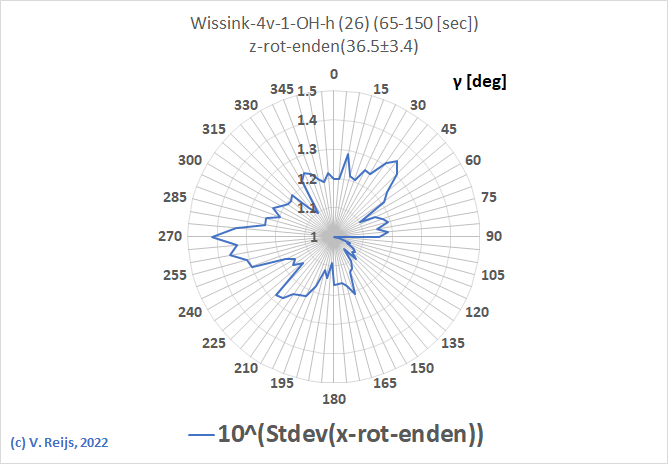
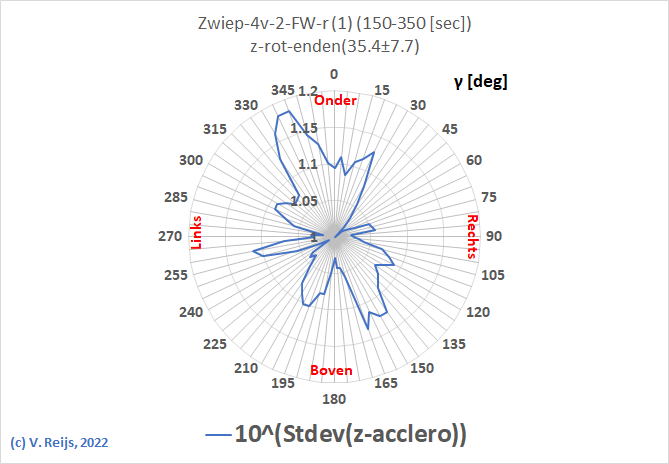
- Het voortschijdend standaard deviation (stdev=1sigma over
0.4sec) is als proxy genomen voor de variatie van de parameter:
z-acceleration (proxy voor Δδ [flapping]), x rot-enden (proxy
voor Δδ [flapping]) en y rot-enden (proxy voor Δβ [pitch]). Deze
parameters vertonen weinig periodische gedrag en bevatten
redelijk wat 'ruis'; daardoor kan de gekozen analyse methode
(met stdev) hopelijker werken.
De stdev is tevens redelijk ongevoelig voor
langzame/gelijdelijke varatie van een parameter. Hier ziet men
het gedrag van z-accelero (zwart gestippeld)) en
stdev(z-accelero) (blauw):
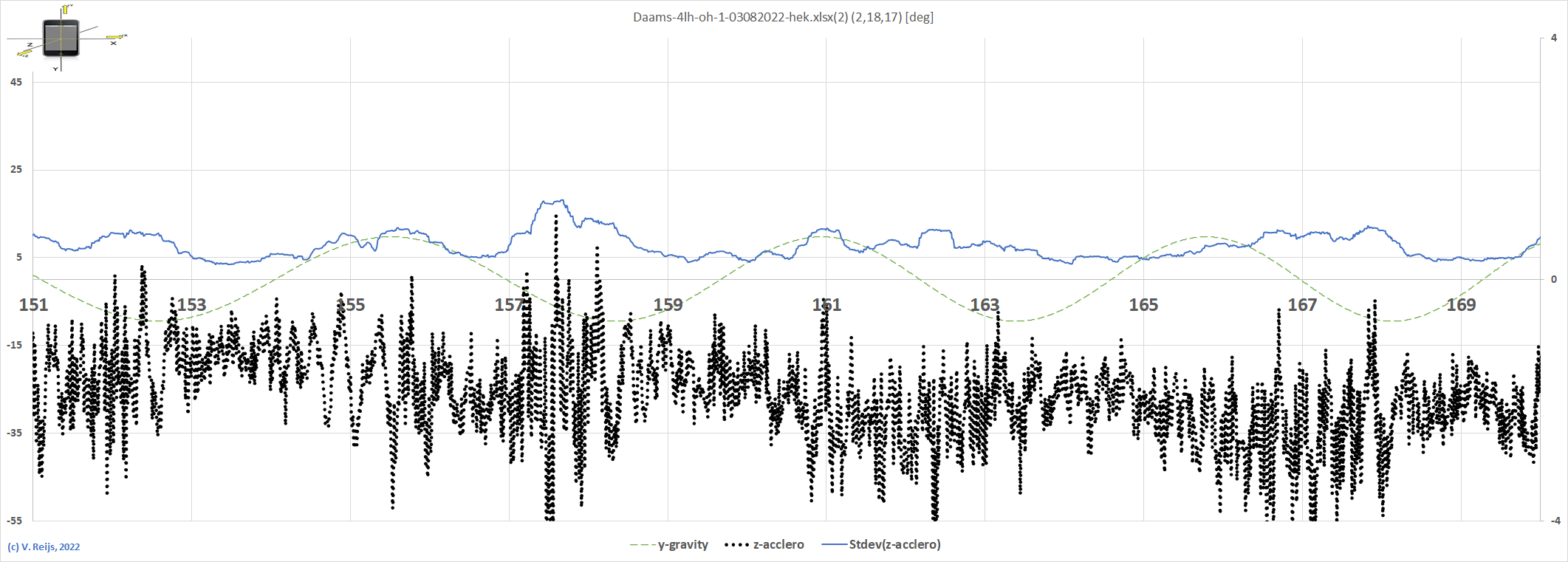
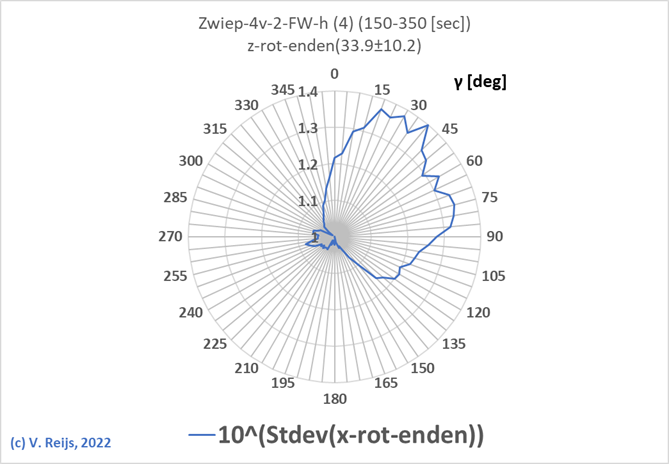
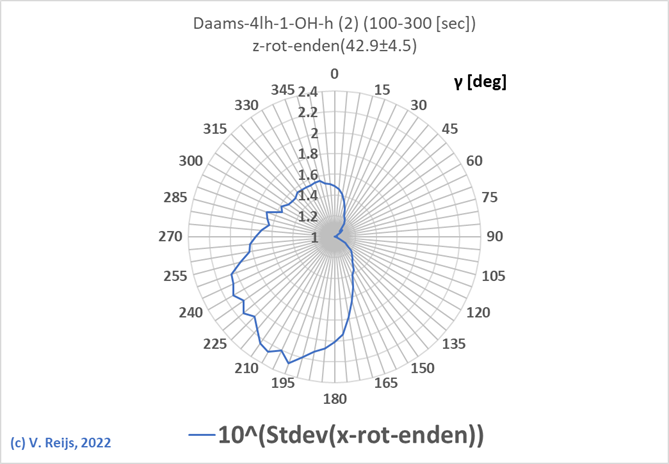
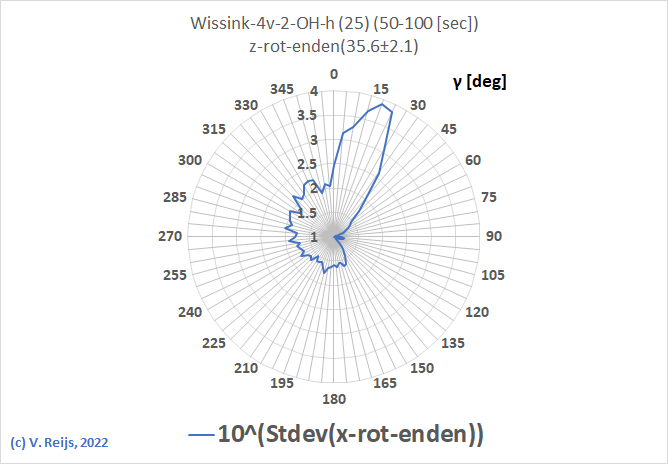
- Om de verschillen tussen kleine en grote waardes van de stdev
duidelijker te representateren is de 10Stdev genomen.
- De aanloop van de wieken en het vangen wordt niet meegenomen
in de analyse.
Wat analyses:
- Bij Wassink's Möl is er over 100sec gevalueerd, terwijl voor
de anderen dat zo'n 200sec was.
Als er gemiddeld is over de langere periode dan zal dat
apart vermeld worden. Als niet apart vermeld, dan is er
gemiddeld over (korte) periodes van 50sec.
- z-accelero en x rot-enden geven gelijkvormige afhankelijkheid
van de rotatie hoek γ
Dit omdat beide min of meer gerelateerd zijn aan δ (flapping).
- Als er gemeten wordt op hek (ong. 1.4) en dan op de roede
(ong. 1.07) van hetzelfde end (gedaan op De Zwiepse Molen en
Daams' Molen) dan is de stdev voor op hek geplaatste iPhone het
grootst.
Dit is te verwachten, omdat het hekwerk bewegelijker is dan de
roede.
- Als het hekwerk geen wiggen heeft (Daams' Molen), dan is de
stdev(y rot-enden) (gemeten op hekwerk) veel groter (ong. 2.4).
Er is behoorlijk veel bewegelijkheid door de 'losse'
bevestiging.
- Alle stdev zijn behoorlijk groot (ong. 3.9) op een borstroede
(Wissink's Möl, gemeten op hekwerk).
Dit is te verwachten omdat een houten roede flexibeler is dan
een stalen roede.
- Vaak is de stdev curve min of meer gespiegeld, dus bv als er
een stdev piek is bij ongeveer γ=160°, dan is er soms ook een
stdev piek bij ongeveer γ=340°
Reden nog aanvullen. Feedback is welkom.
- Het komt ook voor dat er tussen stdev pieken een γ hoek van
ongeveer 90° zit.
Reden nog aanvullen. Feedback is welkom.
- Grote stdev (gemiddelde over 100 of 200sec) komen bijvoorbeeld
voor bij (er is de nodige variatie te zienen nog geen echte
oorzaken aan te wijzen!):
- De Zwiepse Molen Oud Hollands; rond γ=0° en γ=180° (verschil
180°).
- De Zwiepse Molen fokwieken, voor metingen op hekwerk: rond
γ=40°; en voor metingen op roede: rond γ=160° en γ=340°.
- Daams' Molen Oud Hollands; rond γ=200°.
- Prins van Oranje rond γ=125° en γ=215°; of rond γ=60°
- Wissink's Möl rond γ=45° en γ=270°.
- Kijkend naar de korte stdev gemiddelden (periodes van 50sec)
op dezelfde end overde gehele gemeten periode (zo'n 200sec), dan
is er behoorlijk wat variatie waar de stdev pieken plaats
vinden. Nog geen echt patroon ontdekt, er is bv geen mooie
relatie met het aantal enden/min or de varaitie daarin. Moet dus
nog langer bestuderen... Zou dit iets met de yaw te maken
hebben? Feedback is welkom.
Conclusies
- Daar de
ervaring nog maar beperkt is, is niet zeker of de Sensor
Logger een goede App is om versnelling aan molenwieken te
meten. Feedback is welkom.
- Om
de analyse makkelijker te maken, zou men eigenlijk
tegelijkertijd op verschillende enden moeten meten (2 or
meer iPhones).
fsd dsf sdfsd fsd fds
Nog in
te vullen
Referenties
Loss, Theresa and Alexander Bergmann: Moving accelerometers to the tip:
Monitoring of wind turbine blade bending using 3D accelerometers
and model-based bending shapes. In: sensors 20 (2020),
pp. 1-21.
Rommel, D.P. et al.: Calculating wind turbine
component loads for improved life prediction. In: Renewable
energy 146 (2020), pp. 223-241.
Acknowledgements
I would like to thank people, such as Martie te Brake, Machiel
van Erkelens, Gerrit Gramser, Nico Veldkamp en Hennie van
Welbergen and others for their help, encouragement
and/or constructive feedback. Any remaining errors in methodology
or results are my responsibility of course!!! If you want to
provide constructive feedback, let me know.
Major content related
changes: December 5, 2022